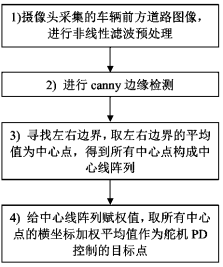
本发明公开了一种基于可见光图像的自动导引运输车路线识别及控制方法,其特征在于,包括以下步骤:1)采用非线性滤波对摄像头采集的车辆前方道路图像进行预处理;2)对预处理后图像进行canny边缘检测;3)在canny边缘检测基础上寻找左右边界,取左右边界的平均值为中心点,得到所有中心点构成中心线阵列;4)给中心线阵列赋权值,其中离摄像头近的区域的中心点权值大于离摄像头远的区域的中心点权值,取所有中心点的横坐标加权平均值作为舵机PD控制的目标点,调节PD的值来控制舵机的角度。该方法以中心点的横坐标加权平均值作为舵机PD控制的目标点,舵机采用PD控制,增强了车子沿线能力,转向提前,减少入弯出弯转向,实现切弯效果。
知识产权交易大厅
当前位置:首页 > 专利交易
基于可见光图像的自动导引运输车路线识别及控制方法
价格:商品编号:
专利号:CN201610480362.4
所属行业:
专利类型:
专利有效期:2019-03-26至2031-03-26
专利授权日期:2019-03-26
专利授权国家:中国
专利权人:常熟理工学院
发明人:刘永俊 乔康琪 欧阳颖 钱振江 张明新 王义
专利状态:有效
所属地区:苏州市
交易方式:
联系人:李小姐 联系方式:020-87395002- 专利详细介绍
- 专利前景
- 专利卖点展示
- 交易流程