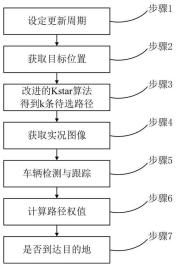
本发明公开基于改进Kstar算法和深度学习的实时路径规划方法。本发明将k shortest paths问题结合到实时路径规划中,通过改进Kstar算法快速高效的找出k条优秀的待选路径,并且提出更加合理的道路评估公式,综合考量通过道路需要花费的时间和道路的拥堵指数,在找出最优路径的同时,缓解交通压力。使用改进的Kstar算法,将道路图区域化,大幅提高启发式搜索的速度,构造堆、路径结构图等高效的数据结构,优化了不必要的内存浪费,在与常规最优路径算法时间复杂度接近的情况下快速得到多条待选路径,有效减少不必要的导航路线规划次数。
知识产权交易大厅
当前位置:首页 > 专利交易
基于改进Kstar算法和深度学习的实时路径规划方法
价格:商品编号:
专利号:CN202011386288.2
所属行业:
专利类型:
专利有效期:2022-08-05至2039-08-05
专利授权日期:2022-08-05
专利授权国家:中国
专利权人:杭州电子科技大学
发明人:袁友伟 周威炜 葛云阳 鄢腊梅
专利状态:有效
所属地区:杭州市
交易方式:
联系人:李小姐 联系方式:020-87395002- 专利详细介绍
- 专利前景
- 专利卖点展示
- 交易流程